This is the second of the five parts discussing the questions that I proposed and their solutions in the recently concluded 9th ASEP StructWhiz challenge.
1 Problem
Problem
from the 9th ASEP StructWhiz Challenge, Final Round, Difficult (90 seconds)
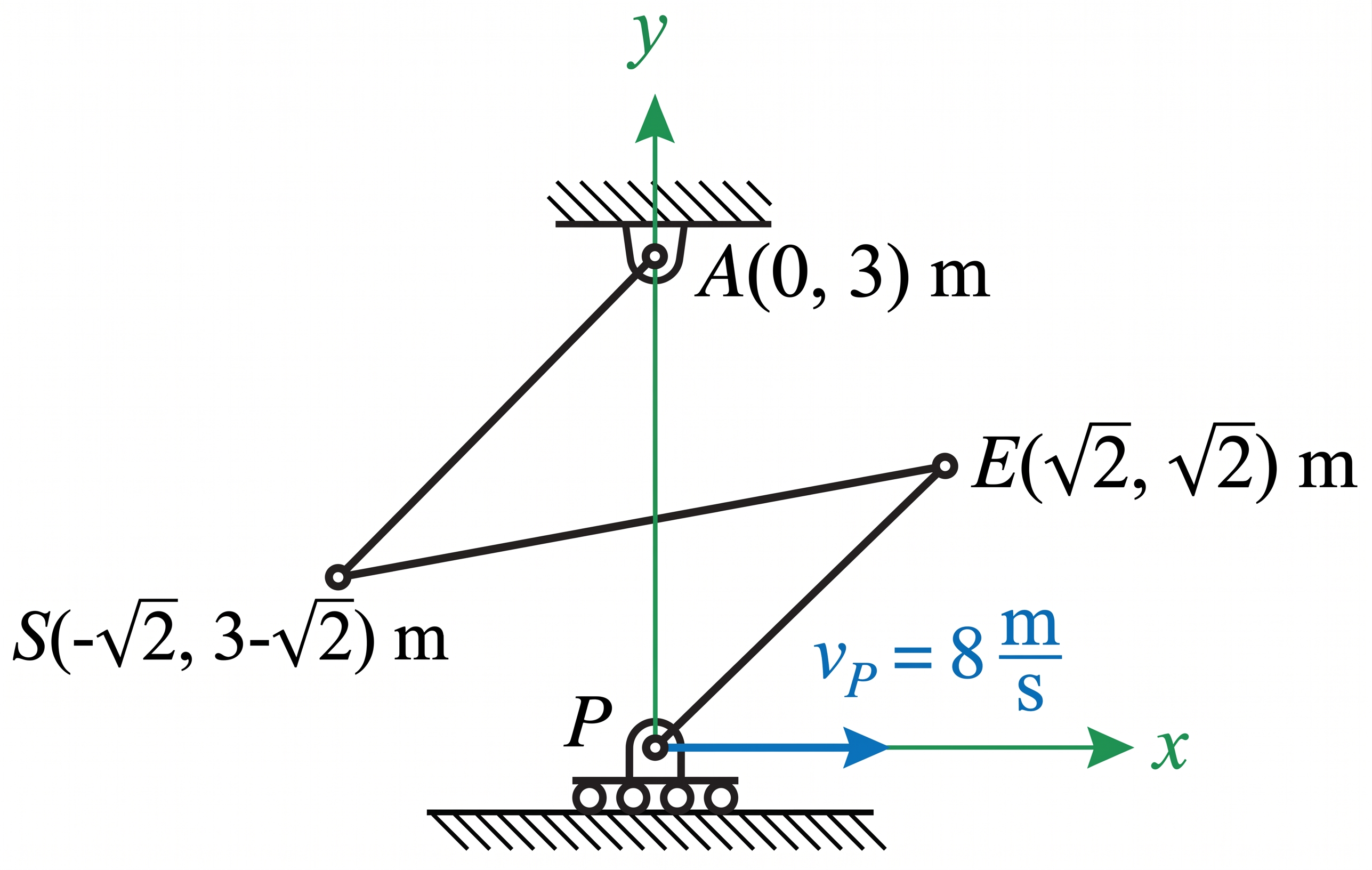
A three-bar assembly ASEP is pinned at A and roller-supported at P as shown. At this instant, P is moving to the right at 8 m/s. Determine the angular speed of bar SE in rad/s.
2 Formulas
Plane motion in the general case is expressed as a single or a system of differential equations in time \(t\), because its motion contains a mix of rectilinear, curvilinear and rotational motions that are related to one another. However, if we slice a range of time \((t_0, t_0 + \Delta t)\) from the whole duration and let the duration of that slice approach zero (\(\Delta t \rightarrow 0\)), then we get the motion of the body at instant \(t_0\). In that case, the motion can be reasonably separated into two parts: a pure translation component, and a pure rotation component. The figure below shows this case.
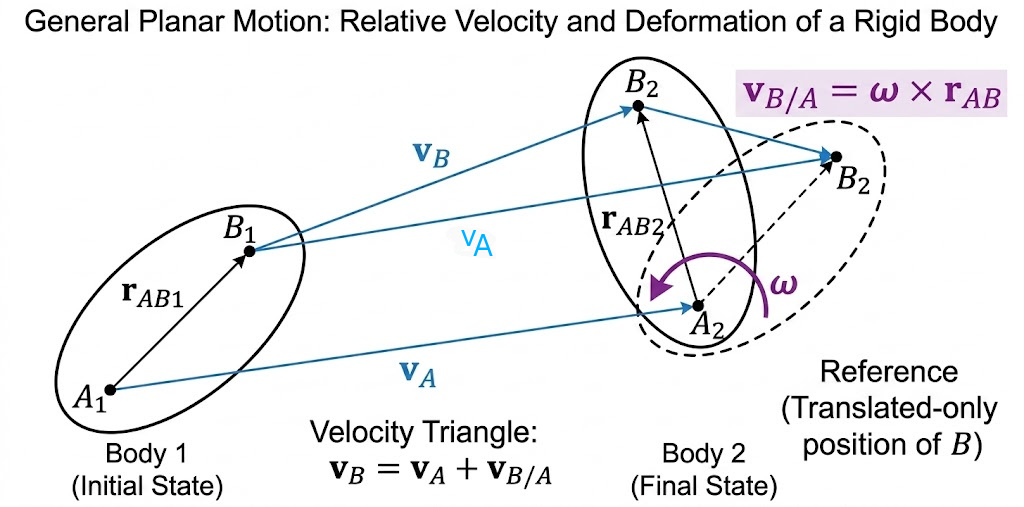
Given two points \(A\) and \(B\) on a rigid body \(\Omega\), the velocity of point \(B\) at instant \(t_0\) is given by
where
- \(\mathbf{v}_A\) is the velocity of point \(A\) in pure translation, and
- \(\mathbf{v}_{B/A}\) is the velocity of point \(B\) relative to a fixed point \(A\) (pure rotation).
Now, the second bullet can be expressed in vector form as
where
- \(\boldsymbol{\omega}\) is the angular velocity of the body about point \(A\). Its direction follows the right-hand rule, which is out of the page in the above figure.
- \(\mathbf{r}_{AB}\) is the radius vector from \(A\) to \(B\).
Take note that equations (1) and (2) require that point \(A\) be only in pure translation and not moving in other directions due to rotation. Otherwise, the formulas will not work. Hence, finding this point \(A\) in general plane motion problems is very crucial.
3 Solution
For our example, though, that point is very easy to find. Since point \(A\) is pinned at the top, it does not move at all.
So, we can set that as the reference point. We can now express the velocity at point \(P\) using equations (1) and (2) as follows:
Now, since we are calculating \(\boldsymbol{\omega} \times \mathbf{r}\) three times in equation (4), it would be best to express it first in closed form. Following right hand rule as discussed in Section 2, we write \(\boldsymbol{\omega} = \left\langle 0, 0, \omega \right\rangle\) and \(\mathbf{r} = \left\langle \Delta x, \Delta y, 0 \right\rangle\), so that
where \(\Delta x = x_2 - x_1\) and \(\Delta y = y_2 - y_1\). Now, we calculate equation (5) for each bar as
Adding these three gives equation (4) as
Comparing components from both sides, we get
Finally, adding equations (7) and (8) gives
This may seem too long for a 90-second problem, but I'm making the solution detailed for the benefit of the readers who probably have never encountered these types of topics. A quizzer would most likely mentally compute some of these steps or input them directly to a calculator, and proceed straight to the core equations.
Comments
Loading comments…